Therapy Session
What is the purpose of the Biofeedback Graph and how can I use it?
The Biofeedback Graph is an interactive tool to confirm that your patient remains active during the Lokomat session. In combination with the high number of repetitions achieved during a training session, this effort results in high training intensity.
The purpose of Biofeedback is to enable both the clinician and the patient to visualize objectively the amount of effort the patient is contributing during a gait cycle. Thus, to provide feedback on the performance of the patient.
How is it displayed?
Biofeedback Graph can be displayed at any moment of the Lokomat session on the therapist screen if you click on the button Biofeedback Graph on the bottom tab of the Lokomat training screen (Figure 1).
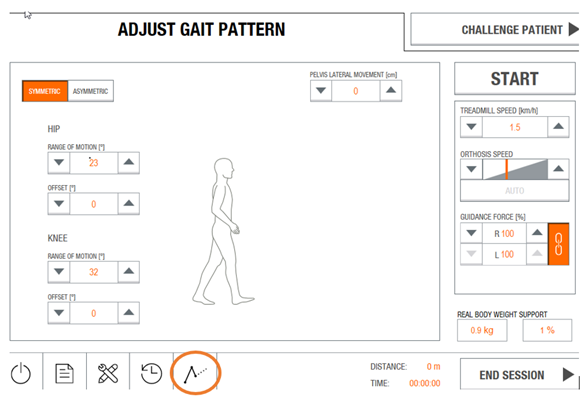
Figure 1: Biofeedback Graph icon on therapist screen.
To display the Biofeedback Graph on the patient screen and therewith enhance the patient’s attention and motivation, choose the Biofeedback Graph on the Library and add it to the therapy plan of your patient (Figure 2).

Figure 2: Biofeedback Graph on patient’s Therapy Plan
In both situations, the Biofeedback Graph is represented as a group of four graphs corresponding to the hip and knee activity for the left and right legs. Every graph has two lines: an orange line that indicates the level of activity during swing phase and a blue line indicating the level of activity during stance phase. On the vertical axis of the graphs (y axis), we can observe the amount of biofeedback units (the Lokocontrol software converts the force measured at the hip and knee joints), while on the horizontal axis (x axis), we can see time in seconds (Figure 3). On a functional level, this allows both the clinician and patient to know whether the patient is active at the appropriate time in the gait cycle.

Figure 3: Biofeedback Graph display with 4 graphs.
Some recommendations for its application:
Based on the experience of Lokomat Users, here are some recommendations on how to benefit from the Biofeedback when treating a patient.
- Observing the baseline: When starting the training and while the patient is still relatively passive, visualize the Biofeedback Graph to see what a “passive” graph looks like.
It is important to remember that the absolute values of the Biofeedback Graph on the y axis may be different from session to session, that is why we recommend observing the session’s baseline during this passive phase.
- Assess the patient’s ability to increase effort: Once you have set a baseline, you can assess your patient’s ability to generate more gait-phase-appropriate force i.e., the patient helps with the movement (graph line goes up), or more gait-phase inappropriate activity, i.e., the patient resists the movement (graph line goes down).
- Use during training: Use the biofeedback screens during training to maximize your patient’s effort. Some examples:
- Adjust the Biofeedback Graph to show only 1 joint in 1 gait phase and get your patient to focus on that particular movement (Figure 2 and 4).
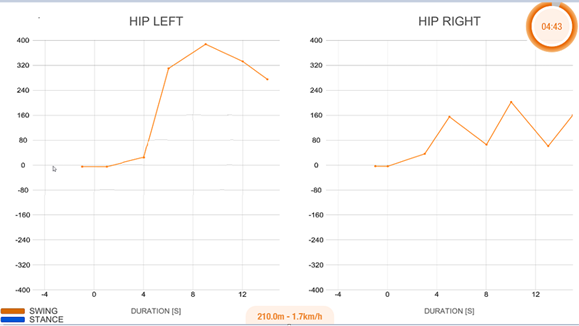
Figure 4: Biofeedback Graph showing 1 joint on patient’s screen.
- Monitor your patient’s effort. You can use the Biofeedback Graph to make sure that your patient is training throughout the entire Lokomat session.
- Monitor the effects of your training adjustments. You can use the Biofeedback Graph to monitor any activation changes in relation to other treatment parameters (speed, loading, guidance force).
How to use the Guidance Force and Path Control During a Lokomat Therapy Session?
On the LokomatPro there is an algorithm called Path Control which is used for training patients at low Guidance Force (GF). When you select a GF below 50% (on both legs), the Path Control algorithm is activated. In this post we will explain you more about the differences between GF and Path Control and how to use the advanced settings of this feature.
|
Guidance Force |
Path Control |
|
What is it? |
|
| GF is the amount of robotic support that the patient receives from the orthoses to perform a predefined gait trajectory. The GF will assist the patient to always follow the predefined trajectory. | Path Control is a control strategy in which the patient can define his/her own gait position, shape of trajectory and timing of the gait pattern within a certain range of both time and position. Therefore, Path Control allows variability of the gait pattern. |
|
How does it work? |
|
| With GF a specific movement trajectory is defined (figure 1, yellow line on the image on the left). The Lokomat guides the patient into a specific position at the corresponding time.
The force with which the patient is guided can be modified, from 0-100%, but the reference trajectory of movement will always trace the same path (the gait pattern that is defined with ROM and Offset). With the GF you tell the motors of the orthosis how much to work, while trying to minimize the deviation between the patient trajectory and the reference trajectory. For example, with 60% GF, the motors give 60% effort, trying to push the patient’s leg along the reference trajectory (figure 1, yellow arrows on the image on the left).
|
With Path Control, the patient is kept within a “tunnel” throughout the complete gait cycle (figure1, yellow tunnel with white circles on the image on the right). In this tunnel the patient has the freedom to make variation within the gait pattern and is not restricted in space or time. The free timing of movements within the tunnel allows for a range of possible spatial positions for each phase of the gait cycle, eg the patient can do longer steps ( video 1- Path control gait variability (click to view) ). Thus, the patient can define his/her own gait pattern within the tunnel, without feeling correction forces. At the edge of the tunnel, the Lokomat guides the subject to stay within the tunnel (figure 1, yellow arrows on the right image).
|
| Figure 1: Left: Guidance Force mode. Right: Path Control mode.
The orange dot indicates the limb position in the sagittal plane at a specific time point in the gait cycle. The yellow arrows represent the forces that push the patient to the reference trajectory (GF) or the tunnel (Path Control). The additional light orange dots on the right side indicate several positions, symbolizing the gait pattern variability within the path control mode. |
|
|
What to use it for? |
|
During a LokomatPro session, these functions can be used to:
|
|
|
Settings |
|
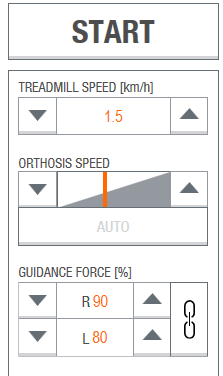
| GF settings can be found on the right-hand side of the screen.
Figure2: GF symmetric at 100% Figure3: GF asymmetric and reduced
With the arrows up and down GF can be set from 0% to 100% (minimum and maximum support by the orthosis). The predefined value is 100% GF (figure 2). GF can be set symmetrical if left and right are coupled (figure 2), with the button on the right in orange (predefined setting) or asymmetrically if the coupling button is deactivated, in white (figure 3). |
|
| Every time that GF is below 50% in both legs, Path Control will be active by default. To enable advanced Path Control settings, follow the instructions below (Lokomat User Manual Chapter 5).
1) Select the button settings on the bottom of the main menu screen of the Lokocontrol (figure 4).
Figure 4: Lokocontrol main menu screen
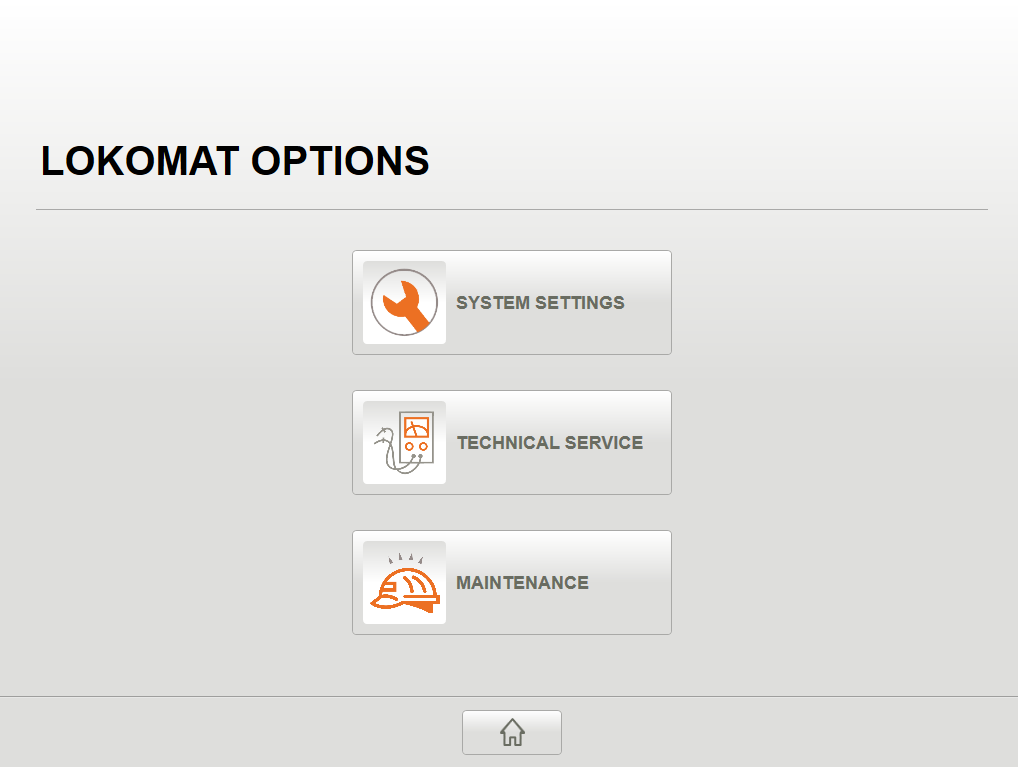
2) Select SYSTEM SETTINGS on the Lokomat options (figure 5).
Figure 5: Lokomat options screen
3) Select the tab configuration and on the right top of the screen select “Enable Advanced Path Control AD” (figure 6)
Figure 6: Configuration Lokocontrol screen
Within the advanced settings of Path Control, the Path Control feature can be turned off. The factory default setting is shown in (figure 7). If the GF is decreased to less than 50% on both legs, two new settings are available:
Figure 7: Path Control advanced settings |
|





REFERENCES
- Aurich-Schuler T, Grob F, van Hedel HJA, Labruyère R. (2017) Can Lokomat therapy with children and adolescents be improved? An adaptive clinical pilot trial comparing Guidance force, Path control, and FreeD. J Neuroeng Rehabil.
- van Kammen K, AM Boonstra, LH van der Woude, HA Reinders-Messelink, and R den Otter. (2016) The combined effects of guidance force, bodyweight support and gait speed on muscle activity during able-bodied walking in the Lokomat. Clin Biomech (Bristol, Avon).
- Duschau-Wicke A, vJ Zitzewitz, A Caprez, L Lünenburger, and R Riener. (2010) Path Control: A Method for Patient-Cooperative Robot-Aided Gait Rehabilitation. IEEE Transactions on nneural systems and rehabilitation engineering.
How do I Challenge the Patient During a Lokomat Therapy Session?
It is imperative that patients are challenged and that they participate actively throughout the whole Lokomat training session. This is important for the following reasons:
- High therapy intensity (high number of repetitions, long therapy durations, frequent training sessions, and high patient activity during each of the repetitions) is crucial when trying to reach a patient’s optimal recovery potential (Spiess et al. 2018).
- A key aspect in motor learning is to challenge people during training according to their skill level. Too low a level of challenge can make a treatment boring, and not encourage motor learning. On the other hand, too high a level of challenge can be frustrating or overwhelming (Guadagnoli and Lee 2004).
- Aerobic training has been shown to improve the cardiorespiratory fitness, as well as physical and psychosocial domains (Winstein et al. 2016), and to promote brain plasticity (Cramer et al. 2011).
Below there are some tips from experienced Lokomat users on maintaining patient engagement throughout the training session.
Adjusting Parameters
You can adjust the training parameters to increase active patient participation leading to a challenging training session.
- Increase the gait speed to the maximum value where the patient still presents a good gait pattern.
- Decrease the Body Weight Support and support the patient only as much as he needs thereby ensuring the highest loading.
- Reduce the Guidance Force and challenge the patient himself to maintain the gait pattern.
Using Lokomat Features
In addition to changing the parameters in order to further challenge the patient, the Lokomat includes three important features designed to increase active participation:
- Training Programs: Add variety to the training and (a) keep the patient motivated throughout the training session, (b) challenge him to react and adapt to the changes the program creates, and (c) increase the variety of required movements to improve motor learning.
- Biofeedback graphs clearly illustrate phase appropriate and inappropriate activation; this information helps to pinpoint problem areas for the patient.
- Augmented Performance Feedback / Virtual Reality Exercises motivates patients by giving real-time feedback on the screen where they can see the effects of their effort in the gait training as they move their character through different challenging games and tasks.
Additionally, some Lokomat users support the use of external cues from the clinicians like, “hit my hand”, “kick this ball”, and “stand up straight”.
Some Considerations
- While keeping a patient’s active participation up is vital to promoting recovery. It is also important to let the patient perform enough repetitions of the gait pattern. Therefore, pay close attention to the patient’s fatigue level, especially during the initial sessions in the Lokomat.
- If upright mobility is new to your patient, make sure to monitor his physiological response to the training.
Spiess, M. R., F. Steenbrink and A. Esquenazi (2018). “Getting the Best out of Advanced Rehabilitation Technology for the Lower Limbs: Minding Motor Learning Principles.” PM&R 10(9, Supplement 2): S165-S173.
Guadagnoli MA, Lee TD (2004). “Challenge point: a framework for conceptualizing the effects of various practice conditions in motor learning.” J Mot Behav. 2004 Jun;36(2):212-24. doi: 10.3200/JMBR.36.2.212-224. PMID: 15130871.
Winstein, C. J., et al. (2016). “Guidelines for Adult Stroke Rehabilitation and Recovery: A Guideline for Healthcare Professionals From the American Heart Association/American Stroke Association.” Stroke 47(6): e98-e169.
Cramer S. C. et al. (2011). “Harnessing neuroplasticity for clinical applications”, Brain, Volume 134, Issue 6, June 2011, Pages 1591–1609, https://doi.org/10.1093/brain/awr039
How do I Define the Optimal Body Weight Support (BWS) Value for Individual Patients?
Initial configuration and ongoing adjustments of the BWS level during Lokomat sessions are key variables of gait training. The aim is always to provide a challenging training in a safe environment. In terms of BWS, this means finding the value where, enough support is provided to allow an upright position, yet reduced to a minimum to provide as much loading as possible.
The default starting value is 50% of the patient’s total body weight. This is based on the experience of Lokomat users who determined that most patients can start a training session at this value. However, it should be adjusted according to the patient’s ability and condition.
What are the criteria for determining the appropriate BWS value?
Whenever possible the maximal load should be applied to the patient. This maintains the appropriate sensory input during the gait cycle and challenges the patient’s entire body. Once a safe walk is achieved, we recommend reducing the BWS to <40% of total weight.
- Patient’s Knees: The main indicator to recognize if the value is correct is the patient’s ability to extend his knee. A sufficient amount of BWS should be maintained to allow the patient to achieve the appropriate gait pattern; pay attention to his ability to extend his hips and knees in stance phase and maintain his trunk upright during the gait cycle.
Training Progression: Once you find a level of BWS that allows for a good gait pattern with good kinematics, it is important to continue challenging your patient. This can be done either by gradually decreasing the amount of BWS, or by changing other gait parameters (e.g. speed, guidance force).
How do I define the BWS value at first?
During the first session you may not know how much support the patient needs, we therefore recommend the following:
- Start with walking in the air at the default value (50% of the patient’s body weight).
- Bring the patient down onto the treadmill until you reach a dynamic range of the BWS.
If, when lowering the patient, you cannot reach a dynamic BWS because the patient cannot carry 50% of his weight and the training session would not be safe (i.e. the knee does not extend during stance phase), then increase the BWS value. - Once the patient is walking in a dynamic range, you can gradually reduce the BWS value while taking care to monitor the patient’s ability to extend his knees. The goal of reducing the BWS value is to support the patient only as much as he needs: we want maximum challenge for the patient but always in a safe training environment.
These recommendations are based on the feedback of experienced Lokomat users.
How do I Define the Optimal Speed for Each Patient?
The Lokomat starts with a default value of 1.5km/h. However, the optimal speed value in order to challenge patients during Lokomat therapy is different for each patient depending on his overall health condition, experience with the Lokomat as well as the individual training goal. Here we provide recommendations to support you defining the optimal speed for each patient.
How do I choose the appropriate speed value for the start if therapy and during training progression?
For the first training session the speed value should not be chosen too fast so that the patient has the ability to accustom to the device and follow the correct gait pattern; it should not be chosen too slowly to enable smooth movements. According to the feedback from experienced Lokomat users for the first training session a speed value between 1.5 and 2.0 km/h seems to be selected most frequently. For children the value is smaller, ranging from 1.0 to 1.5 km/h.
As soon as a safe and nice walking pattern has been established and the patient has been accustomed to walking in the orthosis, increasing the speed value is recommended to challenge the patient during the entire training session. We therefore recommend selecting the highest speed value at which the patient is still able to maintain a nice walking pattern. At the same time the speed should be chosen in accordance with the patients abilities to train for a complete training session.
When does it make sense to select higher or lower speed values?
Higher Speed Values
- Should be chosen when the gait pattern seems not physiological due to a low speed; increasing the speed might help the walking pattern to look “smoother” (Reisman et al., 2009; Tyrell et al., 2011)
- Imply more number of repetitions and increase the challenge for the patient during the training session. A challenge point optimization is required to provide sufficient afferent feedback and positively influence neuroplastic events in particularly early after injury (Pohl et al., 2002; Lamontagne & Fung, 2004; Miller et al., 2008; Outermans et al., 2010; Wada et al., 2010; Kuys et al, 2011).
- Make sure that the speed value is continuously increased over training progression to ensure a challenging walking session and support each patients potential for functional recovery (Andriacchi et al., 1977; Wagenaar & Beek, 1992; Wagenaar & van Emmerik, 1995)
- When the training goal is to enhance an “automatized” gait pattern during over ground walking a high speed value during the training session is required (Hesse et al., 2001; Kwakkel & Wagenaar, 2002).
- If patients are already able to walk but the training goal is to further increase their comfortable walking speed overground an increased speed value during Lokomat assisted training is required.
Lower Speed Values
Despite the fact that a high speed value is required in order to sufficiently challenge patients during their walking session lower speed values may be recommended:
- During the first training sessions, so that the patient can accustom to the orthosis and the walking pattern.
- The speed value needs to be reduced if it is too high for a patient to endure a whole training session.
- When the training requires time to focus on a specific movement for example consciously extending the knee during stance phase (Nogueira et la., 2013).
- For consciously activating muscle contraction and recruiting muscle fibers for specific muscle strength training.
- In patients with spasticity when starting the training session until the muscle tone regulates and adapts to the movement. A high speed can enhance a spastic reaction which could cause the orthosis to stop for safety reasons (Bohannon & Andrews, 1990).
What do I need to consider when changing the speed value?
- The step length should be adapted to the speed.
- The orthosis speed value should be adjusted (you can also us the automatic setting).
- The hip offset may require adjustments (towards extension).
- If the quality of the movement will be affected, e.g. heel strike at initial contact.
- The joints need to be able to support the increasing impact.